4.5.4. Aeroacoustics Noise Models
The aeroacoustics noise of wind turbine rotors emanates from pressure oscillations that are generated along the blades and propagate in the atmosphere. This source of noise has been historically simulated with models characterized by different fidelity levels. At lower fidelity, models correlated aeroacoustics noise with rotor thrust and torque ([aa-Low70, aa-Vit81]). At higher fidelity, three-dimensional incompressible computational fluid dynamics models are coupled with the Ffowcs Williams-Hawkings model to propagate pressure oscillations generated along the surface of the rotor blades to the far field ([aa-KGW+18]). The latter models are often only suitable to estimate noise at low frequency because capturing noise in the audible range, which is commonly defined between 20 (hertz) Hz and 20 kilohertz (kHz), requires a very fine space-time discretization with enormous computational costs.
For the audible range, a variety of models is available in the public domain, and [aa-SBCB18] offers the most recent literature review. These models have inputs that match the inputs and outputs of modern aeroservoelastic solvers, such as OpenFAST, and have therefore often been coupled together. Further, the computational costs of these acoustic models are similar to the costs of modern aeroservoelastic solvers, which has facilitated the coupling.
Models have targeted different noise generation mechanisms following the distinction defined by [aa-BPM89], and the mechanism of turbulent inflow noise. The latter represents a broadband noise source that is generated when a body of arbitrary shape experiences an unsteady lift because of the presence of an incident turbulent flow. For an airfoil, this phenomenon can be interpreted as leading-edge noise. Turbulent inflow noise was the topic of multiple investigations over the past decades and, as a result, multiple models have been published ([aa-SBCB18]). The BPM model includes five mechanisms of noise generation for an airfoil immersed in a flow:
Turbulent boundary layer – trailing edge (TBL-TE)
Separation stall
Laminar boundary layer – vortex shedding
Tip vortex
Trailing-edge bluntness – vortex shedding.
For the five mechanisms, semiempirical models were initially defined for the NACA 0012 airfoil. The BPM model is still a popular model for wind turbine noise prediction, and subsequent studies have improved the model by removing some of the assumptions originally adopted. Recent studies have especially focused on the TBL-TE mechanism, which is commonly the dominant noise source of modern wind turbines. As a result, each noise source defined in the BPM model now has a variety of permutations.
The following subsections describe the details of each mechanism and the models implemented in this model of OpenFAST.
4.5.4.1. Turbulent Inflow
A body of any arbitrary shape, when immersed in a turbulent flow, generates surface pressure fluctuations. Over the years, several formulations of the turbulent inflow noise model have been developed ([aa-SBCB18]). In this model of OpenFAST, the formulation defined in [aa-MGM04] is adopted. The formulation is based on the model of Amiet ([aa-Ami75, aa-PA76]) and is presented in Section 4.5.4.1.1. Additionally, the user can activate the correction defined by [aa-MH05], which builds upon the Amiet model and accounts for the thickness of the airfoils adopted along the blade span. This second model is named Simplified Guidati and is presented in Section 4.5.4.1.2.
4.5.4.1.1. Amiet model
The formulation is based on work from [aa-Ami75] and [aa-PA76], and it represents the blade as a flat plate and neglects the shape of the airfoil.
The model starts by first computing the wave number, \(k_{1}\), for a given frequency \(f\):
where \(U_{1}\) is the incident inflow velocity on the profile. From \(k_{1}\), the wave numbers \({\overline{k}}_{1}\) and \({\widehat{k}}_{1}\) are computed:
where \(c_{i}\) is the local chord, and \(k_{e}\) is the wave number range of energy containing eddies, defined as:
Lt is the turbulent length scale, and many different formulations have been proposed over the years. As default implementation, \(L_{t}\) is defined following the formulation proposed in [aa-ZHS05]:
where \(z\) is the height above the ground of the leading edge of section \(i\) at a given instant, \(t\), while \(z_{0}\) is the surface roughness. Note that setting \(L_{t}\) appropriately is a challenge, and advanced users of this model may want to validate this formulation against experimental data.
The value of sound pressure level (\(\text{SPL}\)) is expressed in one-third octave bands at the given frequency, \(f\), originated at the given blade station, \(i\), which can be computed as:
where \(\rho\) is the air density, \(c\) the speed of sound, \(d\) the blade element span, \(r_{e}\) the effective distance between leading edge and observer, \(M\) the Mach number, \(I_{1}\) the turbulence intensity of the airfoil inflow, and \(\overline{D}\) the directivity term. \(\overline{D}\) is different below (\({\overline{D}}_{l}\)) and above (\({\overline{D}}_{h}\)) a certain frequency, which is named “cut-off” and defined as:
The formulations of \({\overline{D}}_{h}\ \)and \({\overline{D}}_{l}\) are presented in Section 4.5.4.6.
The current implementation offers two approaches to estimate \(I_{1}\). The first one is through a user-defined \(I_{1}\). The second option is to have the code reconstructing \(I_{1}\) from the turbulent wind grid, where the code computes the airfoil relative position of each blade section, \(i\), at every time instant and, given the rotor speed, reconstructs the inflow component, \(I_{1}\), of the turbulence intensity.
Two corrections to this model are also implemented. The first one comprises a correction for the angle of attack, \(\alpha\), in which the effect is neglected in the original formulation from [aa-Ami75] and Amiet and Peterson (1976). This correction is formulated as:
The second correction is called low-frequency correction (\(\text{LFC}\)), and is formulated as:
In (4.40) and (4.41), \(S^{2}\) represents the squared Sears function, and \(\beta^{2}\) is the Prandtl-Glauert correction factor, which is defined as:
It is worth stressing that numerous alternative formulations of the turbulent inflow noise model exist ([aa-SBCB18]), where the main differences comprise different definitions of \(L_{t}\) and \(k_{1}\).
4.5.4.1.2. Simplified Guidati
Sound spectra are often overpredicted by the Amiet model implemented here. Guidatai ([aa-GBW+97]) derived a correction to the sound pressure levels by adding a term considering shape and camber of the airfoil profiles, but the method proved computationally too expensive for wind turbine simulations. Moriarty et al. ([aa-MGM05]) proposed a simplified model based on geometric characteristics of six wind turbine airfoils. The validity of the correction is limited to Mach numbers on the order of 0.1 ≈ 0.2 and Strouhal number \(\text{St}\) below 75. \(\text{St}\) is defined based on airfoil chord and mean inflow velocity:
The formula for the correction to the noise spectra is provided in Eq. 4 in [aa-MGM05]:
where \(t_{x\%}\) is the relative thickness of the profile at \(x\) position along the chord (i.e., 0% being the leading edge and 100% the trailing edge).
It should be highlighted here that a validation campaign was conducted in a wind tunnel on two-dimensional airfoils ([aa-MGM04]), returning a fairly poor match between the Simplified Guidati model and the experimental results. Therefore, a correction of +10 decibels (dB) on the SPL levels across the whole frequency spectrum was proposed. This correction is still implemented, but a validation at turbine level should assess the accuracy of the models for turbulent inflow. It should also be noted that the code currently does not check whether Mach and Strouhal numbers are within the range of validity of this model.
4.5.4.2. Turbulent Boundary Layer – Trailing Edge
Airfoils immersed in a flow develop a boundary layer, which at high Reynolds numbers is turbulent. When the turbulence passes over the trailing edge, noise is generated. This noise source was named TBL-TE in [aa-BPM89] and it is a relevant source of aeroacoustics noise for modern wind turbine rotors. Two formulations of TBL-TE noise are implemented in the code: (1) the original formulation from the BPM model, described in Section 4.5.4.1.1, and (2) a more recent model developed at the Dutch research institute, TNO, described in Section 4.5.4.1.2. Both models take as input the characteristics of the airfoil boundary layer. These must be provided by the user and are discussed in Section 4.5.7.2.
4.5.4.2.1. BPM
The \(\text{SPL}\) of the TBL-TE noise in the BPM model is made from three contributions:
where the subscripts p, s, and α refer to the contributions of pressure side, suction side, and angle of attack, respectively. The equations describing the three contributions are described in great detail in Section 5.1.2, in [aa-BPM89], and are summarized here.
For the suction and pressure contributions, the equations are:
The terms in the equations, which are also described in the nomenclature at the beginning of this document, list \(\delta^{*}\) as the boundary layer displacement thickness on either side of the airfoil, \(St,\) as the Strouhal number based on \(\delta^{*}\), and \(A\), \(A'\), \(B\), \({\Delta K}_{1}\), \(K_{1}\), and \(K_{2}\) as empirical functions based on \(\text{St}\).
For the angle-of-attack contribution, a distinction is made above and below the stall angle, which in the original BPM model is set equal to 12.5 degrees, whereas it is here assumed to be the actual stall angle of attack of the airfoil at blade station i. Below stall, \(\text{SPL}_{\alpha}\) is equal to:
At angles of attack above the stall point, the flow along the profile is fully separated and noise radiates from the whole chord.\(\ \text{SPL}_{p}\) and \(\text{SPL}_{s}\) are then set equal to -∞, whereas \(\text{SPL}_{\alpha}\) becomes:
Notably, above stall the low-frequency directivity \({\overline{D}}_{l}\) is adopted in Eqs. 18 and 19 (see Section 4.5.4.6).
4.5.4.2.2. TNO model
The TNO model is a more recent model to simulate the noise emitted by the vortices shed at the trailing edge of the blades and was formulated by Parchen ([aa-Par98]). The implementation adopted here is the one described in Moriarty et al. (2005). The TNO model uses the spectrum of the wave number, \(\overline{k}\), of unsteady surface pressures to estimate the far-field noise. The spectrum, \(P\), is assumed to be:
In the equation, the indices 1, 2, and 3 refer to the directions parallel to the airfoil chord, normal to the airfoil chord, and along span, respectively; \(\phi_{22}\) is the vertical velocity fluctuation spectrum; \(\phi_{m}\) is the moving axis spectrum; and \(U_{c}\) is the convection velocity of the eddies along the trailing edge. Lastly, \(L_{2}\) is the vertical correlation length, perpendicular to the chord length, which indicates the vertical extension of the vortices that convect over the trailing edge. In this work, \(L_{2}\) is assumed equal to the mixing length, \(L_{m}\) (Moriarty et al. 2005). This decision is partially arbitrary, and dedicated research should better assess the correct integral length to be adopted within the TNO model.
From \(P\), the far-field spectrum, \(S\left( \omega \right)\), is computed as:
The implementation of the TNO model is identical to the one described in [aa-MGM05]. The inputs to the model are generated from the boundary layer characteristics provided by the user (see Section 4.5.7.2).
4.5.4.3. Laminar Boundary Layer – Vortex Shedding
Another source of airfoil self-noise noise included in the BPM model is the noise generated by a feedback loop between vortices being shed at the trailing edge and instability waves in the laminar boundary layer. This noise is typically distributed on a narrow band of frequencies and occurs when the boundary layer of the airfoil remains laminar. This may occur in the inboard region of smaller wind turbines, where the Reynolds number can be smaller than 1 million, but hardly occurs in modern rotors that operate at a Reynolds number one order of magnitude larger. The formula to estimate the noise spectrum in a one-third-octave presentation is:
where \(G\) represents empirical functions, \({St'}_{\text{peak}}\) is the peak Strouhal number function of \(\text{Re}_{c}\), which is the Reynolds number at chord, \(c_{i}\). The subscript 0 refers to a reference Reynolds number that is a function of the angle of attack (Brooks et al. 1989).
4.5.4.4. Tip Vortex
The vortices generated at blade tips are another source of noise of the BPM model. Although rarely relevant in modern wind turbines, the possibility to include this noise source is offered. The sound pressure level is estimated as:
where \(M_{\max}\ = \ M_{\max}\left( \alpha_{\text{tip}} \right)\) is the maximum Mach number, measured near the blade tip within the separated flow region that is assumed to depend on \(\alpha_{\text{tip}}\), which is the angle of attack at the tip; \(l\) is the spanwise extent of the separation zone; and \(St'''\) is the Strouhal number based on \(l\). For a round shape of the tip, \(l\) is estimated as:
where \(\alpha_{\text{tip}}\) is the angle of attack of the tip region to the incoming flow. For a square tip, the BPM model estimates \(l\) based on the quantity, \({\alpha'}_{\text{tip}}\), which is defined as:
where \(L'\) is the lift per unit span along the blade at position \(y\). For \({\alpha'}_{\text{tip}}\) between 0 and 2 degrees, \(l\) becomes:
while for \({\alpha'}_{\text{tip}}\) larger than 2 degrees, \(l\) is:
However, it must be noted that, unfortunately, \(\alpha_{\text{tip}}\) is not a reliable output of standard aeroelastic models and the impossibility to accurately determine \(\alpha_{\text{tip}}\) weakens the formulation of the tip vortex noise.
4.5.4.5. Trailing-Edge Bluntness – Vortex Shedding
Lastly, wind turbine blades are often characterized by a finite height of the trailing edge, which generates noise as a result of vortex shedding. The frequency and amplitude of this noise source depends on the geometry of the trailing edge and is typically characterized by a tonal nature. Adopting flatback and truncated airfoils far outboard along the blade may strengthen this noise source. When this noise source is activated, the user is asked to provide the distribution along the blade span of the blunt thickness of the trailing edge, \(h\), and the solid angle between the suction and pressure sides of the airfoil, \(\Psi\) (see Section 4.5.4.2). \(h\) and \(\Psi\) are inputs to the equation:
In the equation, \(\delta_{\text{avg}}^{*}\) is the average displacement thickness for both sides of the airfoil. Note that this noise source is very sensitive to \(h\) and \(\Psi\), which, therefore, should be estimated accurately.
4.5.4.6. Directivity
The position of one or more observers is specified by the user, as described in Section 4.5.7.3. The directivity from the BPM model is adopted in this implementation ([aa-BPM89]). The directivity term, \(\overline{D}\), corrects the \(\text{SPL}\) depending on the relative position of the observer to the emitter. The position is described by the spanwise directivity angle, \(\Phi_{e}\), and by the chordwise directivity angle, \(\Theta_{e}\), which are schematically represented in Fig. 4.17 and defined as:
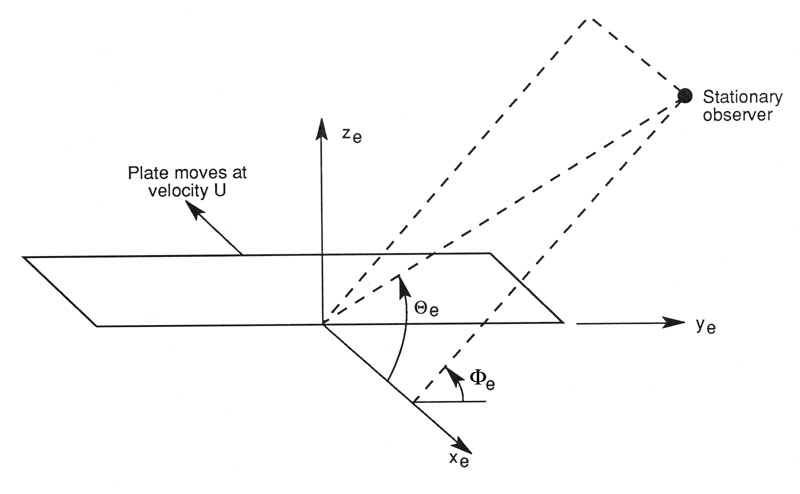
The reference axis is located at each blade node and \(x_{e}\) is aligned with the chord, \(y_{e}\) is aligned with the span pointing to the blade tip, and \(z_{e}\) is aligned toward the airfoil suction side. Note that in OpenFAST the local airfoil-oriented reference system is used, and a rotation is applied.
Given the angles \(\Theta_{e}\) and \(\Phi_{e}\), at high frequency, \(\overline{D}\) for the trailing edge takes the expression:
where \(M_{c}\) represents the Mach number past the trailing edge and that is here for simplicity assumed equal to 80% of free-stream M.
For the leading edge, and therefore for the turbulent inflow noise model, at high frequency, \(\overline{D}\) is:
Note that this equation was not reported in the NLR Tech Report NREL/TP-5000-75731!
At low frequency, the equation is identical for both leading and trailing edges:
Each model distinguishes a different value between low and high frequency. For the TI noise model, the shift between low and high frequency is defined based on \({\overline{k}}_{1}\). For the TBL-TE noise, the model differences instead shift between below and above stall, where\(\ {\overline{D}}_{h}\)and \({\overline{D}}_{l}\) are used, respectively.
4.5.4.7. A-Weighting
The code offers the possibility to weigh the aeroacoustics outputs by A-weighting, which is an experimental coefficient that aims to take into account the sensitivity of human hearing to different frequencies. The A-weight, \(A_{w}\), is computed as:
The A-weighting is a function of frequency and is added to the values of sound pressure levels: