6.3.1. OpenFAST C++ Application Programming Interface
OpenFAST provides a C++ application programming interface (API) to drive wind turbine simulations from an external program in C++. The C++ API was developed mainly to integrate OpenFAST with Computational Fluid Dynamics (CFD) solvers for Fluid-Structure Interaction (FSI) applications. It currently supports FSI simulations using the actuator line method with plans to support blade-resolved FSI simulations in the near future. The C++ API can also be used to create an external driver program or glue code that runs OpenFAST simulations of several wind turbines in parallel.
The C++ API is defined and implemented in the fast::OpenFAST class. Any user who wants to write a glue-code for OpenFAST in C++ should instantiate an object of the OpenFAST class and use it to drive the simulation of turbines. A sample glue-code FAST_Prog.cpp is provided as a demonstration of the usage of the C++ API. The glue-code allows for the simulation of multiple turbines using OpenFAST in serial or in parallel over multiple processors. The message passing interface (MPI) is used to run the different instances of turbines in parallel. An abbrievated version of FAST_Prog.cpp is shown below. The highlighted lines indicate the use of the OpenFAST class.
#include "OpenFAST.H"
#include "yaml-cpp/yaml.h"
#include <iostream>
#include <mpi.h>
void readTurbineData(int iTurb, fast::fastInputs & fi, YAML::Node turbNode) {
//Read turbine data for a given turbine using the YAML node
}
void readInputFile(fast::fastInputs & fi, std::string cInterfaceInputFile, double * tEnd) {
//Read input data for a given turbine using the YAML node
}
int main() {
int iErr;
int nProcs;
int rank;
iErr = MPI_Init(NULL, NULL);
iErr = MPI_Comm_size( MPI_COMM_WORLD, &nProcs);
iErr = MPI_Comm_rank( MPI_COMM_WORLD, &rank);
double tEnd ; // This doesn't belong in the OpenFAST - C++ API
int ntEnd ; // This doesn't belong in the OpenFAST - C++ API
std::string cDriverInputFile="cDriver.i";
fast::OpenFAST FAST;
fast::fastInputs fi ;
readInputFile(fi, cDriverInputFile, &tEnd);
ntEnd = tEnd/fi.dtFAST; //Calculate the last time step
FAST.setInputs(fi);
// In a parallel simulation, multiple turbines have to be allocated to processors.
// The C++ API can handle any allocation of turbines on an arbitrary number of processors
FAST.allocateTurbinesToProcsSimple(); // Use this for a simple round robin allocation of turbines to processors.
// Or allocate turbines to procs by calling "setTurbineProcNo(iTurbGlob, procId)" for each turbine.
FAST.init();
if (FAST.isTimeZero()) {
FAST.solution0();
}
if( !FAST.isDryRun() ) {
for (int nt = FAST.get_ntStart(); nt < ntEnd; nt++) {
FAST.step();
}
}
FAST.end() ;
MPI_Finalize() ;
return 0;
}
All inputs to the OpenFAST class are expected through an object of the fast::fastInputs.
FIXME: doxygenclass is needed to render the fast::fastInputs class structure
The object of fast::fastInputs class is expected hold a struct vector of type fast::turbineDataType and size of the number of turbines in the simulation.
FIXME: doxygenstruct is needed to render the fast::turbineDataType class structure
6.3.1.1. Use of C++ API for Actuator Line Simulations
The C++ API was developed mainly to integrate OpenFAST with Computational Fluid Dynamics (CFD) solvers for Fluid-Structure Interaction (FSI) applications. The workhorse FSI algorithm for wind energy applications today is the Actuator Line algorithm [cpp-CLM+12]. The Actuator Line algorithm represents the effect of a turbine on a flow field as a series of point forces at actuator points along aerodynamic surfaces. The use of Blade Element Momentum theory in AeroDyn is modified to interface OpenFAST with CFD solvers for actuator line simulations. The CFD solver becomes the inflow module for OpenFAST that provides velocity information near the turbine. The calculation of the induction factors is turned off in OpenFAST and AeroDyn simply uses look up tables and an optional dynamic stall model to calculate the loads on the turbine based on the inflow field information received from the CFD solver. The induction model should be turned off in OpenFAST by selecting WakeMod=0 in the AeroDyn input file. OpenFAST lumps the line forces along the blades and tower into a series of point forces for the actuator line algorithm. Fig. 6.1 illustrates the transfer of information between OpenFAST and a CFD solver for actuator line applications.
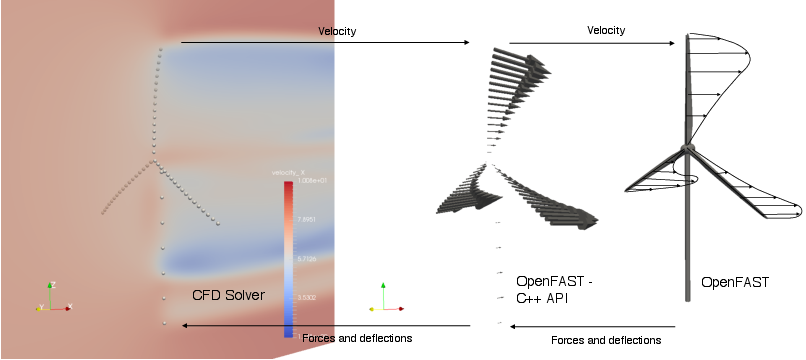
Fig. 6.1 Illustration of transfer of velocity, loads and deflection between a CFD solver and OpenFAST through the C++ API for actuator line applications.
The CFD solver is expected to be the driver program for actuator line FSI simulations coupled to OpenFAST. The C++ API allows for substepping where the driver timestep is an integral multiple of the OpenFAST time step (\(\Delta_t^{CFD} = n \Delta_t^{OpenFAST}\)). The current implementation of the C++ API for OpenFAST allows for a serial staggered FSI scheme between the fluid (CFD) and structural (OpenFAST) solver. Fig. 6.2 shows a suggested implementation of a loosely coupled serial staggered FSI scheme to move the simulation from time step n to n+1 for actuator line applications. A strongly coupled FSI scheme can be constructed through the repetition of the coupling algorithm in Fig. 6.2 through “outer” iterations.
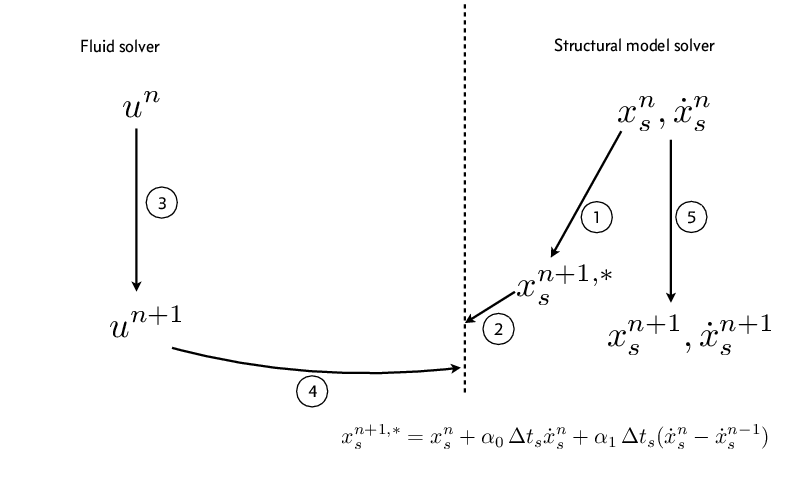
Fig. 6.2 A conventional serial staggered FSI scheme that can be constructed through the C++ API for actuator line applications.
OpenFAST uses different spatial meshes for the various modules [cpp-Jon13]. We define the actuator points to be along the mesh defined in the structural model (ElastoDyn/BeamDyn) of the turbine. The user defines the required number of actuator points along each blade and the tower through the input parameters numForcePtsBlade and numForcePtsTower for each turbine. The number of actuator points have to be the same on all blades. The C++ API uses OpenFAST to create the requested number of actuator points through linear interpolation of the nodes in the structural model. The mesh mapping algorithm in OpenFAST [cpp-SJJ15] is used to transfer deflections from the structural model and loads from AeroDyn to the actuator points. To distinguish the actuator points from the Aerodyn points, the OpenFAST C++ uses the term forceNodes for the actuator points and velNodes (velocity nodes) for the Aerodyn points. The following piece of code illustrates how one can use the C++ API to implement a strongly coupled FSI scheme with “outer” iterations for actuator line applications. This sample piece of code sets the velocity at the velNodes and access the coordinates and the lumped forces at the forceNodes.
std::vector<double> currentCoords(3);
std::vector<double> sampleVel(3);
for (int iOuter=0; iOuter < nOuterIterations; iOuter++) {
FAST.predict_states(); //Predict the location and force at the actuator points at time step 'n+1'.
for(iTurb=0; iTurb < nTurbines; iTurb++) {
for(int i=0; i < FAST.get_numVelPts(iTurb); i++) {
// Get actuator node co-ordinates at time step 'n+1'
FAST.getForceNodeCoordinates(currentCoords, i, iTurb, fast::np1);
//Move the actuator point to this co-ordinate if necessary
// Get force at actuator node at time step 'n+1'
FAST.getForce(actForce, i, iTurb, fast::np1);
//Do something with this force
}
}
// Predict CFD solver to next time step here
for(iTurb=0; iTurb < nTurbines; iTurb++) {
for(int i=0; i < FAST.get_numVelPts(iTurb); i++) {
// Get velocity node co-ordinates at time step 'n+1'
FAST.getVelNodeCoordinates(currentCoords, i, iTurb, fast::np1);
//Sample velocity from CFD solver at currentCoords into sampleVel here
// Set velocity at the velocity nodes at time step 'n+1'
FAST.setVelocity(sampleVel, i, iTurb, fast::np1);
}
}
FAST.update_states_driver_time_step(); // Predict the state of OpenFAST at the next time step
}
// Move OpenFAST to next CFD time step
FAST.advance_to_next_driver_time_step();
6.3.1.2. Implementation
The C++ API uses the C-Fortran interface to call the same functions as the Fortran driver internally to advance the OpenFAST in time. FAST_Library.f90 contains all the functions that can be called from the C++ API. Some of the corresponding functions between the C++ API and the Fortran module are shown in the following table.
C++ API - OpenFAST.cpp |
Fortran - FAST_Library.f90 |
FAST_Subs.f90 |
|---|---|---|
init() |
FAST_AL_CFD_Init |
FAST_InitializeAll_T |
solution0() |
FAST_CFD_Solution0 |
FAST_Solution0_T |
prework() |
FAST_CFD_Prework |
FAST_Prework_T |
FAST_CFD_Store_SS |
FAST_Store_SS |
|
update_states_driver_time_step() |
FAST_CFD_UpdateStates |
FAST_UpdateStates_T |
FAST_CFD_Reset_SS |
FAST_Reset_SS |
|
advance_to_next_driver_time_step() |
FAST_CFD_AdvanceToNextTimeStep |
FAST_AdvanceToNextTimeStep_T |
The FAST_Solution_T subroutine in FAST_Subs.f90 is split into three different subroutines FAST_Prework_T, FAST_UpdateStates_T and FAST_AdvanceToNextTimeStep_T to allow for multiple outer iterations with external driver programs. Extra subroutines FAST_Store_SS and FAST_Reset_SS are introduced to move OpenFAST back by more than 1 time step when using sub-stepping with external driver programs. The typical order in which the Fortran subroutines will be accessed when using the C++ API from an external driver program is shown below.
call FAST_AL_CFD_Init
call FAST_CFD_Solution0
do i=1, nTimesteps
if (nSubsteps .gt. 1)
call FAST_CFD_Store_SS
else
call FAST_CFD_Prework
end if
do iOuter=1, nOuterIterations
if (nSubsteps .gt. 1)
if (iOuter .ne. 1) then
! Reset OpenFAST back when not the first pass
call FAST_CFD_Reset_SS
end if
do j=1, nSubsteps
! Set external inputs into modules here for the substep
call FAST_CFD_Prework
call FAST_CFD_UpdateStates
call FAST_CFD_AdvanceToNextTimeStep
end do !Substeps
else
call FAST_CFD_UpdateStates
end if
end do !Outer iterations
if (nSubsteps .gt. 1) then
! Nothing to do here
else
call FAST_CFD_AdvanceToNextTimeStep
end if
end do
The mapping of loads and deflections to the actuator points is performed in the ExternalInflow module in OpenFAST. The C++ API supports the use of both BeamDyn and ElastoDyn to model the blades. When using BeamDyn to model the blade, the C++ API requires the use of only 1 finite element for each blade along with the choice of trapezoidal quadrature for actuator line simulations.
6.3.1.3. Test for mapping procedure
The test for the implementation of the mapping procedure is as follows. OpenFAST is run using the C++ API to simulate the Jonkman 5-MW (formerly known as the NREL 5-MW) turbine for one time step with a prescribed velocity of \(8 m/s\) at all the velocity nodes and no induction (WakeMod=0). The number of actuator force nodes is varied from 10 to 100 while the number of velocity nodes is fixed at 17. Fig. 6.3 and Fig. 6.4 show that the thrust and torque vary by less than \(1.1 \times 10^{-6}\%\) and \(2 \times 10^{-6}\%\) respectively when the number of actuator force nodes is varied from \(10-100\).
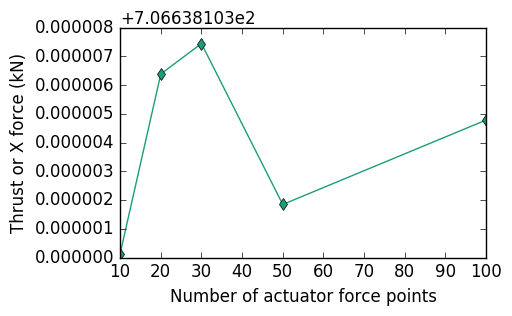
Fig. 6.3 Variation of thrust using different number of actuator force nodes in OpenFAST for the same number of velocity nodes.
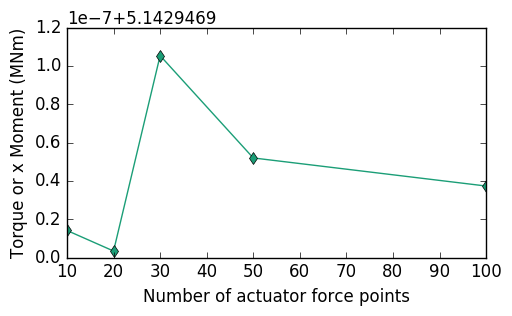
Fig. 6.4 Variation of torque using different number of actuator force nodes in OpenFAST for the same number of velocity nodes.
6.3.1.4. References
- cpp-CLM+12
Matthew Churchfield, Sang Lee, Patrick Moriarty, Luis Martinez, Stefano Leonardi, Ganesh Vijayakumar, and James Brasseur. A Large-Eddy Simulation of Wind-Plant Aerodynamics. American Institute of Aeronautics and Astronautics, 2017/07/18 2012. URL: https://doi.org/10.2514/6.2012-537, doi:doi:10.2514/6.2012-537.
- cpp-Jon13
Jason M. Jonkman. The new modularization framework for the fast wind turbine cae tool. Technical Report NREL/CP-5000-57228, National Renewable Energy Laboratory, January 2013.
- cpp-SJJ15
Michael A. Sprague, Jason M. Jonkman, and Bonnie J. Jonkman. Fast modular framework for wind turbine simulation: new algorithms and numerical examples. Technical Report NREL/CP-2C00-63203, National Renewable Energy Laboratory, January 2015.